I2C驱动
https://www.i2c-bus.org/i2c-primer/termination-versus-capacitance/
硬件电路

I2C 总线使用 SDA 和 SCL 传输数据和时钟。首先要意识到:SDA 和 SCL 是开漏(在 TTL 世界中也称为开集),也就是说 I2C 主设备和从设备只能将这些线路驱动为低电平或保持开路。如果没有 I2C 设备将其拉低,终端电阻Rp 会将线路拉高至 Vcc。这允许同时操作多个 I2C 主设备(如果它们具有**多主设备功能)或拉伸(从设备可以通过按住 SCL 来减慢通信速度)等功能。
终端电阻 Rp 与线路电容 Cp 一起影响 SDA 和 SCL 上信号的时间行为。虽然 I2C 设备使用开漏驱动器或 FET 拉低线路(通常可以驱动至少约 10mA 或更多),但上拉电阻 Rp 负责将信号恢复到高电平。Rp 通常在 1 kΩ 至 10 kΩ 之间,导致典型的上拉电流约为 1 mA 或更小。这就是 I2C 信号具有锯齿状外观的原因。事实上,每个“齿”在上升沿显示线路的充电特性,在下降沿显示放电特性。
SDA(上)和 SCL(下)的 Rp = 10 kΩ 和 Cp = 300 pF。SCL 时钟以 100 kHz(标称值)运行。
I2C设备驱动
I2C设备注册
- 调用
rt_i2c_bus_device_device_init,将I2C设备注册到rt_device中
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
|
struct rt_i2c_bus_device_ops
{
rt_ssize_t (*master_xfer)(struct rt_i2c_bus_device *bus,
struct rt_i2c_msg msgs[],
rt_uint32_t num);
rt_ssize_t (*slave_xfer)(struct rt_i2c_bus_device *bus,
struct rt_i2c_msg msgs[],
rt_uint32_t num);
rt_err_t (*i2c_bus_control)(struct rt_i2c_bus_device *bus,
int cmd,
void *args);
};
struct rt_i2c_bus_device
{
struct rt_device parent;
conststruct rt_i2c_bus_device_ops *ops;
rt_uint16_t flags;
struct rt_mutex lock;
rt_uint32_t timeout;
rt_uint32_t retries;
void *priv;
};
rt_err_trt_i2c_bus_device_device_init(struct rt_i2c_bus_device *bus,
constchar *name)
{
device->user_data = bus;
device->init = RT_NULL;
device->open = RT_NULL;
device->close = RT_NULL;
device->read = i2c_bus_device_read;
device->write = i2c_bus_device_write;
device->control = i2c_bus_device_control;
}
|
I2C总线设备驱动
初始化
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
|
rt_err_trt_i2c_bus_device_register(struct rt_i2c_bus_device *bus,
constchar *bus_name)
{
rt_mutex_init(&bus->lock, "i2c_bus_lock", RT_IPC_FLAG_PRIO);
if (bus->timeout == 0) bus->timeout = RT_TICK_PER_SECOND;
res = rt_i2c_bus_device_device_init(bus, bus_name);
return res;
}
|
transfer
- 加锁形成临界区,调用
master_xfer函数,完成I2C数据传输
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
|
err = rt_mutex_take(&bus->lock, RT_WAITING_FOREVER);
if (err != RT_EOK)
{
return (rt_ssize_t)err;
}
ret = bus->ops->master_xfer(bus, msgs, num);
err = rt_mutex_release(&bus->lock);
|
1
2
3
4
5
|
msg.flags = flags | RT_I2C_RD;
ret = rt_i2c_transfer(bus, &msg, 1);
|
1
2
3
4
5
|
msg.flags = flags;
ret = rt_i2c_transfer(bus, &msg, 1);
|
软件I2C
- TIMING_DELAY 默认 10us, 即10kHz
- TIMING_TIMEOUT 默认 10 tick
初始化
- 初始化I2C 引脚,设置为开漏输出,默认高电平
1
2
3
4
5
6
7
8
9
|
rt_pin_mode(cfg->scl_pin, PIN_MODE_OUTPUT_OD);
rt_pin_mode(cfg->sda_pin, PIN_MODE_OUTPUT_OD);
rt_pin_write(cfg->scl_pin, PIN_HIGH);
rt_pin_write(cfg->sda_pin, PIN_HIGH);
|
1
2
3
4
5
6
|
SDA 和 SCL 是开漏,也就是说 I2C 主设备和从设备只能将这些线路驱动为低电平或保持开路。如果没有 I2C 设备将其拉低,终端电阻Rp 会将线路拉高至 Vcc。
终端电阻 Rp 与线路电容 Cp 一起影响 SDA 和 SCL 上信号的时间行为。虽然 I2C 设备使用开漏驱动器或 FET 拉低线路(通常可以驱动至少约 10mA 或更多),但上拉电阻 Rp 负责将信号恢复到高电平。Rp 通常在 1 kΩ 至 10 kΩ 之间,导致典型的上拉电流约为 1 mA 或更小。这就是 I2C 信号具有锯齿状外观的原因。事实上,每个“齿”在上升沿显示线路的充电特性,在下降沿显示放电特性。
|
- 调用
rt_i2c_bus_device_register注册设I2C总线设备,初始化总线互斥量
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
|
struct rt_i2c_bit_ops
{
void *data;
void (*set_sda)(void *data, rt_int32_t state);
void (*set_scl)(void *data, rt_int32_t state);
rt_int32_t (*get_sda)(void *data);
rt_int32_t (*get_scl)(void *data);
void (*udelay)(rt_uint32_t us);
rt_uint32_t delay_us;
rt_uint32_t timeout;
void (*pin_init)(void);
rt_bool_t i2c_pin_init_flag;
};
intrt_soft_i2c_init(void)
{
obj->ops = soft_i2c_ops;
obj->ops.data = cfg;
obj->i2c_bus.priv = &obj->ops;
}
|
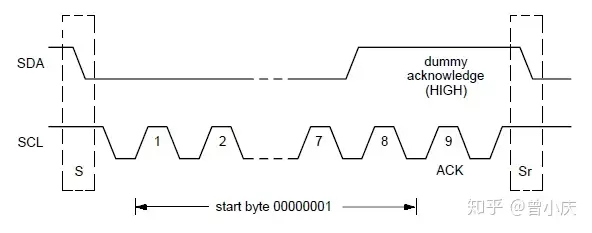
3.i2c_bus_unlock解锁I2C
总线表现:SCL为高,SDA一直为低
原因:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
正常情况下,I2C总线协议能够保证总线正常的读写操作。
但是,当I2C主设备异常复位时(看门狗动作,板上电源异常导致复位芯片动作,手动按钮复位等等)有可能导致I2C总线死锁产生。下面详细说明一下总线死锁产生的原因。在I2C主设备进行读写操作的过程中.主设备在开始信号后控制SCL产生8个时钟脉冲,然后拉低SCL信号为低电平,在这个时候,从设备输出应答信号,将SDA信号拉为低电平。
如果这个时候主设备异常复位,SCL就会被释放为高电平。此时,如果从设备没有复位,就会继续I2C的应答,将SDA一直拉为低电平,直到SCL变为低电平,才会结束应答信号。
而对于I2C主设备来说.复位后检测SCL和SDA信号,如果发现SDA信号为低电平,则会认为I2C总线被占用,会一直等待SCL和SDA信号变为高电平。
这样,I2C主设备等待从设备释放SDA信号,而同时I2C从设备又在等待主设备将SCL信号拉低以释放应答信号,两者相互等待,I2C总线进入一种死锁状态。
同样,当I2C进行读操作,I2C从设备应答后输出数据,如果在这个时刻I2C主设备异常复位而此时I2C从设备输出的数据位正好为0,也会导致I2C总线进入死锁状态。
这样主从进入一个相互等待的死锁过程。
|
解决方式:
1
2
3
4
5
6
7
|
死锁解决方法
在I2C主设备中增加I2C总线恢复程序。每次I2C主设备复位后,如果检测到SDA数据线被拉低,则控制I2C中的SCL时钟线产生9个时钟脉冲(针对8位数据的情况),这样I2C从设备就可以完成被挂起的读操作,从死锁状态中恢复过来。
这种方法有很大的局限性,因为大部分主设备的I2C模块由内置的硬件电路来实现,软件并不能够直接控制SCL信号模拟产生需要时钟脉冲。
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
|
staticrt_err_ti2c_bus_unlock(conststruct soft_i2c_config *cfg)
{
rt_ubase_t i = 0;
if(PIN_LOW == rt_pin_read(cfg->sda_pin))
{
while(i++ < 9)
{
rt_pin_write(cfg->scl_pin, PIN_HIGH);
rt_hw_us_delay(cfg->timing_delay);
rt_pin_write(cfg->scl_pin, PIN_LOW);
rt_hw_us_delay(cfg->timing_delay);
}
}
if(PIN_LOW == rt_pin_read(cfg->sda_pin))
{
return -RT_ERROR;
}
return RT_EOK;
}
|
读写 i2c_bit_xfer
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
|
#define RT_I2C_WR 0x0000
#define RT_I2C_RD (1u<<0)
#define RT_I2C_ADDR_10BIT (1u<<2)
#define RT_I2C_NO_START (1u<<4)
#define RT_I2C_IGNORE_NACK (1u<<5)
#define RT_I2C_NO_READ_ACK (1u<<6)
#define RT_I2C_NO_STOP (1u<<7)
staticrt_ssize_ti2c_bit_xfer(struct rt_i2c_bus_device *bus,
struct rt_i2c_msg msgs[],
rt_uint32_t num)
{
for (i = 0; i < num; i++)
{
msg = &msgs[i];
ignore_nack = msg->flags & RT_I2C_IGNORE_NACK;
if (!(msg->flags & RT_I2C_NO_START))
{
if (i)
{
i2c_restart(ops);
}
else
{
LOG_D("send start condition");
i2c_start(ops);
}
ret = i2c_bit_send_address(bus, msg);
if ((ret != RT_EOK) && !ignore_nack)
{
LOG_D("receive NACK from device addr 0x%02x msg %d",
msgs[i].addr, i);
goto out;
}
}
if (msg->flags & RT_I2C_RD)
{
ret = i2c_recv_bytes(bus, msg);
if (ret >= 1)
{
LOG_D("read %d byte%s", ret, ret == 1 ? "" : "s");
}
if (ret < msg->len)
{
if (ret >= 0)
ret = -RT_EIO;
goto out;
}
}
else
{
ret = i2c_send_bytes(bus, msg);
if (ret >= 1)
{
LOG_D("write %d byte%s", ret, ret == 1 ? "" : "s");
}
if (ret < msg->len)
{
if (ret >= 0)
ret = -RT_ERROR;
goto out;
}
}
}
ret = i;
out:
if (!(msg->flags & RT_I2C_NO_STOP))
{
LOG_D("send stop condition");
i2c_stop(ops);
}
return ret;
}
|
i2c_start
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
staticvoidi2c_start(struct rt_i2c_bit_ops *ops)
{
#ifdef RT_I2C_BITOPS_DEBUG
if (ops->get_scl &&!GET_SCL(ops))
{
LOG_E("I2C bus error, SCL line low");
}
if (ops->get_sda &&!GET_SDA(ops))
{
LOG_E("I2C bus error, SDA line low");
}
#endif
SDA_L(ops);
i2c_delay(ops);
SCL_L(ops);
}
|
i2c_restart
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
staticvoidi2c_restart(struct rt_i2c_bit_ops *ops)
{
SDA_H(ops);
SCL_H(ops);
i2c_delay(ops);
SDA_L(ops);
i2c_delay(ops);
SCL_L(ops);
}
|
i2c_stop
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
|
staticvoidi2c_stop(struct rt_i2c_bit_ops *ops)
{
SDA_L(ops);
i2c_delay(ops);
SCL_H(ops);
i2c_delay(ops);
SDA_H(ops);
i2c_delay2(ops);
}
|
i2c_writeb
- 从高位到低位发送数据,发送一个字节数据,等待ACK
- 每个bit由SDA发送,低电平表示0,高电平表示1;每次发送一个bit,等待SCL高电平,发送下一个bit
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
for (i = 7; i >= 0; i--)
{
SCL_L(ops);
bit = (data >> i) & 1;
SET_SDA(ops, bit);
i2c_delay(ops);
if (SCL_H(ops) < 0)
{
LOG_D("i2c_writeb: 0x%02x, "
"wait scl pin high timeout at bit %d",
data, i);
return -RT_ETIMEOUT;
}
}
SCL_L(ops);
i2c_delay(ops);
returni2c_waitack(ops);
|
i2c_waitack
- 等待ACK;在SCL高电平时,读取SDA电平,ACK为低电平,NACK为高电平
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
|
rt_inline rt_bool_ti2c_waitack(struct rt_i2c_bit_ops *ops)
{
rt_bool_t ack;
SDA_H(ops);
i2c_delay(ops);
if (SCL_H(ops) < 0)
{
LOG_W("wait ack timeout");
return -RT_ETIMEOUT;
}
ack = !GET_SDA(ops);
LOG_D("%s", ack ? "ACK" : "NACK");
SCL_L(ops);
return ack;
}
|
i2c_readb
- 从高位到低位接收数据,接收一个字节数据
- 必须在SCL高电平期间读取SDA电平
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
|
staticrt_int32_ti2c_readb(struct rt_i2c_bus_device *bus)
{
rt_uint8_t i;
rt_uint8_t data = 0;
struct rt_i2c_bit_ops *ops = (struct rt_i2c_bit_ops *)bus->priv;
SDA_H(ops);
i2c_delay(ops);
for (i = 0; i < 8; i++)
{
data <<= 1;
if (SCL_H(ops) < 0)
{
LOG_D("i2c_readb: wait scl pin high "
"timeout at bit %d", 7 - i);
return -RT_ETIMEOUT;
}
if (GET_SDA(ops))
data |= 1;
SCL_L(ops);
i2c_delay2(ops);
}
return data;
}
|
i2c_bit_send_address
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
addr1 = msg->addr << 1;
if (flags & RT_I2C_RD)
addr1 |= 1;
for (i = 0; i <= retries; i++)
{
ret = i2c_writeb(bus, addr);
if (ret == 1 || i == retries)
break;
LOG_D("send stop condition");
i2c_stop(ops);
i2c_delay2(ops);
LOG_D("send start condition");
i2c_start(ops);
}
|
i2c_recv_bytes
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
|
while (count > 0)
{
val = i2c_readb(bus);
if (val >= 0)
{
*ptr = val;
bytes ++;
}
else
{
break;
}
ptr ++;
count --;
LOG_D("recieve bytes: 0x%02x, %s",
val, (flags & RT_I2C_NO_READ_ACK) ?
"(No ACK/NACK)" : (count ? "ACK" : "NACK"));
if (!(flags & RT_I2C_NO_READ_ACK))
{
val = i2c_send_ack_or_nack(bus, count);
if (val < 0)
return val;
}
}
|
i2c_send_ack_or_nack
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
staticrt_err_ti2c_send_ack_or_nack(struct rt_i2c_bus_device *bus, intack)
{
struct rt_i2c_bit_ops *ops = (struct rt_i2c_bit_ops *)bus->priv;
if (ack)
SET_SDA(ops, 0);
i2c_delay(ops);
if (SCL_H(ops) < 0)
{
LOG_E("ACK or NACK timeout.");
return -RT_ETIMEOUT;
}
SCL_L(ops);
return RT_EOK;
}
|
STM32 HAL I2C
1.HAL_I2C_Mem_Write : 发送设备地址,也发送寄存器地址,再发送数据
2.HAL_I2C_Master_Transmit: 发送设备地址,再发送数据
3.HAL_I2C_Master_Seq_Transmit_IT: 通信的序列(Seq)传输函数
阻塞方式
- 等待
I2C_FLAG_BUSY不被设置,超时时间25ms
ISR->BUSY 此标志表示在总线上正在进行通信。当检测到启动条件时,它由硬件设置。当检测到STOP条件或PE=0时,硬件清除。
- 根据发送长度执行不同的发送方式
->255 ,使用 I2C_RELOAD_MODE
- <=255,使用
I2C_AUTOEND_MODE
- 调用
I2C_TransferConfig ,执行 I2C_GENERATE_START_WRITE写入
- 等待
TXIS标志设置,才能写入数据
发送传输状态:当I2C_TXDR寄存器为空,要传输的数据必须写入I2C_TXDR寄存器时,该位由硬件设置。当下一个要发送的数据被写入I2C_TXDR寄存器时,它将被清除。
- 如果是>255数据,需要多次写入,等待
I2C_FLAG_TCR标志设置,再次执行发送
- 结束后等待
STOPF标志设置,发送停止条件
非阻塞 中断方式
- HAL_I2C_Master_Transmit_IT
- 设置ISR回调函数
I2C_Master_ISR_IT
- 发送设备地址
- 使能
使能 ERR、TC、STOP、NACK、TXI 中断
- 中断服务函数
HAL_I2C_EV_IRQHandler -> I2C_Master_ISR_IT
由中断中判断还未发送完数据,继续发送;
发送完成后调用 I2C_ITMasterSeqCplt
- 触发回调
HAL_I2C_MasterTxCpltCallback
非阻塞 DMA
SEQ传输函数
https://blog.csdn.net/NeoZng/article/details/128496694
硬件I2C驱动
- IT方式和DMA启用完成量进行通信;且TX和RX使用同一个的完成量
原因:对于主机来说,对于需要接收的数据,也需要先发送命令在执行接收;所以使用同一个完成量,并不会存在冲突;对于主机收发来说,非阻塞方式并无意义,所以使用完成量来进行通信