@[toc]
Linux 内核中断与时间子系统深度解析:从硬件到jiffies的完整生命周期
1. 引言
Linux内核的稳定运行,高度依赖于其底层两大基石——中断处理框架与时间管理子系统。中断框架负责响应来自硬件的异步事件,而时间管理子系统则为整个内核提供统一的时间基准——jiffies全局节拍计数器。这两大系统并非独立运行,而是通过一套设计精良、层次分明的接口进行精密协作。在某些配置模式下,jiffies的每一次递增,都源于一个硬件定时器产生的物理中断。
本文旨在对这一协作过程进行一次完整的、端到端的深度剖析。我们将首先详细阐述jiffies的双重更新模型,然后分别深入其在动态时钟(NOHZ)和高精度定时器驱动下的实现路径。随后,文章将回溯到传统的低精度模式,分析硬件定时器如何被注册为系统节拍源,并追踪一个硬件中断从发生到最终触发通用tick处理的完整流程。最后,我们将对内核中断处理的完整生命周期进行梳理,揭示其从静态初始化到运行时触发的精妙设计。
2. jiffies 的双重更新模型
Linux内核对jiffies的更新并非采用单一策略,而是根据CPU的运行状态和系统配置,在两种截然不同的模型间切换。
其双重模型概念如下图所示:
1 | graph TD |
流程图 2.1:jiffies更新的双重模型概览
2.1 周期性Tick模型 (Periodic Tick Model)
- 适用条件:此模型在CPU持续执行非空闲任务,或内核未完全开启
CONFIG_NO_HZ_FULL等动态时钟配置时被激活。 - 工作机制:内核中存在一个周期性的时钟中断事件。该中断以一个由内核编译时配置的
HZ值所决定的固定频率(例如250Hz)规律性地发生。 jiffies更新行为:在每一次时钟中断的服务例程中,tick_periodic()函数都将被调用,其核心任务之一就是将全局变量jiffies_64的值原子性地增加1。
此模型的更新流程如下图所示:
1 | graph TD |
流程图 2.1.1:周期性Tick模型下的jiffies更新流程
2.2 动态时钟/无Tick模型 (NOHZ / Tickless Model)
- 适用条件:当一个CPU通过执行
do_idle进入idle状态,或被配置为用于特定任务的“full NOHZ”模式时,此模型生效。 - 工作机制:为了降低功耗,内核会停止该CPU上的周期性时钟中断。
jiffies更新策略:jiffies的更新被推迟,采用一种**“按需更新”或“追赶式更新”(Catch-up Update)**的策略。更新操作被延迟到下一次该CPU上发生任何硬件中断的时刻,届时一次性补偿所有错过的节拍。
此模型的模式切换如下图所示:
1 | graph TD |
流程图 2.2.1:NOHZ模型的模式切换
3. NOHZ 追赶式更新路径解析
在NOHZ模型下,jiffies的更新与CPU从idle状态的唤醒过程紧密耦合。
- 进入Idle:
tick_nohz_idle_enter()被调用,停止周期性tick,并在停止前执行最后一次jiffies更新。 - 被中断唤醒: 当CPU正在
do_idle()中睡眠时,一个外部中断到来,将CPU唤醒。
其“追赶式更新”的详细调用路径如下图所示:
1 | graph TD |
流程图 3.1:NOHZ模型下从idle唤醒时的jiffies追赶式更新流程
4. 传统低精度定时器 Tick 源注册路径
在不使用高精度定时器的模式下,jiffies的更新直接依赖于一个被配置为周期性中断的硬件定时器。其注册过程是典型的Linux驱动模型。
- 核心抽象:
struct clock_event_device,它是内核对一个能产生中断的硬件定时器的软件抽象。
4.1 初始化注册流程
此注册流程如下图所示:
1 | graph TD |
流程图 4.1.1:tick_handle_periodic 静态注册调用链
调用链逐一剖析如下:
stm32_clockevent_init(dev): 硬件驱动初始化一个clock_event_device结构体。clockevents_register_device(dev): 将该设备注册到内核全局时钟事件框架。tick_check_new_device(dev):tick子系统评估并决定采用该设备作为tick源。tick_set_periodic_handler(td, handler): 将tick的核心处理函数tick_handle_periodic注册为该硬件设备的中断事件处理器,通过dev->event_handler = tick_handle_periodic;实现。
4.2 运行时中断触发流程
当硬件定时器产生中断时,动态的执行流程开始。
其中断触发与ISR调用流程如下图所示:
1 | graph TD |
流程图 4.2.1:从硬件中断到平台特定ISR的调用流程
stm32_clock_event_handler是硬件驱动层提供的、与物理中断直接绑定的ISR。其内部逻辑的核心是调用clkevt->event_handler(clkevt)。由于此函数指针在初始化时已被设置为tick_handle_periodic,因此最终tick_handle_periodic被执行,完成jiffies的递增。
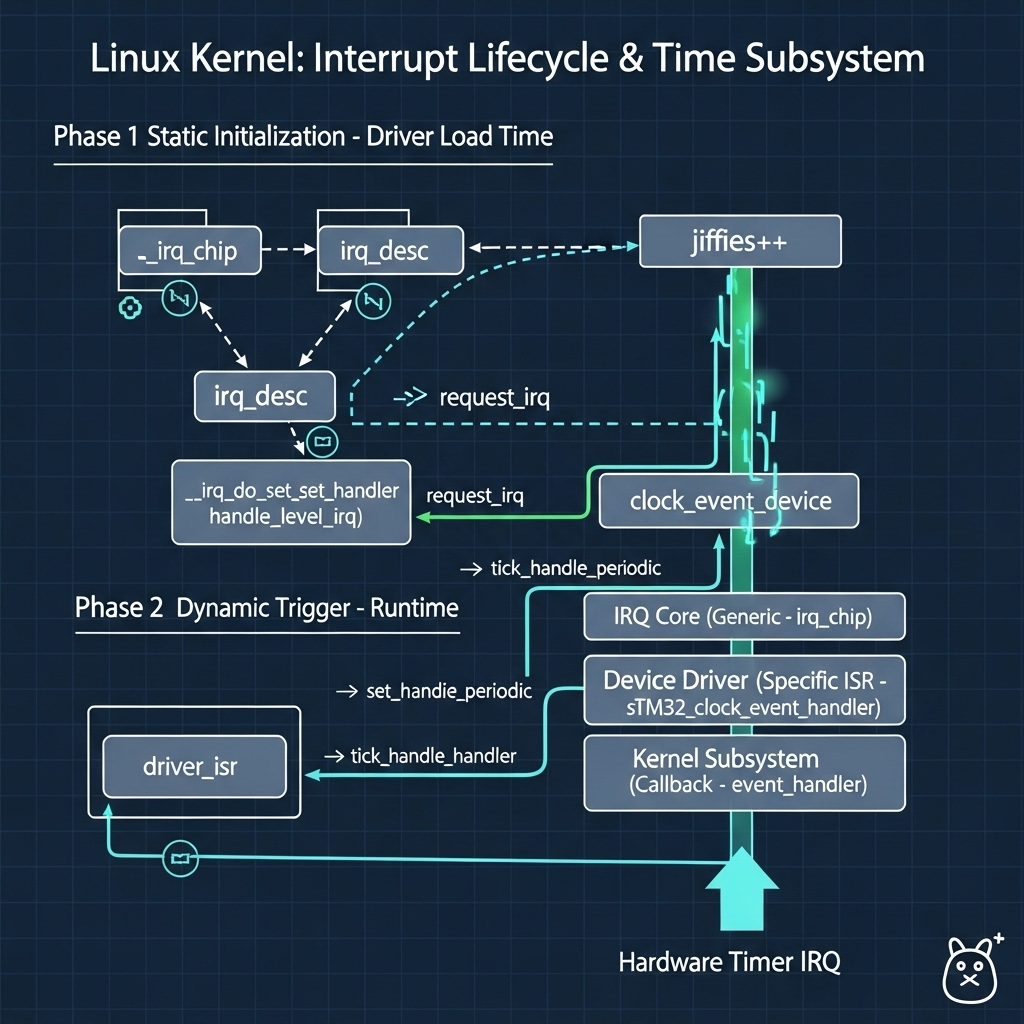
5. 中断处理框架的完整生命周期
Linux的中断系统采用两级分层的委托调用机制,实现了高度的抽象和解耦。
5.1 静态初始化阶段
此阶段在驱动加载时执行,通过多个层次的函数调用,建立起中断处理的完整映射关系。
此阶段的初始化层次如下图所示:
1 | graph TD |
流程图 5.1.1:中断处理函数的静态注册层次
5.2 动态触发阶段
当中断发生时,初始化阶段建立的委托调用链被依次激活。
此阶段的动态执行流程如下图所示:
1 | graph TD |
流程图 5.2.1:中断的动态委托调用流程
6. 结论
Linux内核的时间与中断系统是一个层层递进、高度抽象的复杂工程。jiffies的更新机制从简单的周期性模型,演化为能够适应NOHZ节能需求的动态追赶模型,并能灵活地由高精度或低精度硬件驱动。其底层依赖的中断处理框架,通过“通用策略”与“具体机制”分离的两级委托调用模式,实现了对纷繁硬件的高度解耦和统一管理。理解这一完整生命周期,是深入把握Linux内核架构健壮性与可扩展性的关键。
 微信
微信- 支付寶









