@[toc]
MAX14830 可移植 C 驱动实现分析:一个适合多串口扩展场景的开源基础版本
在嵌入式系统中,串口资源不足是一个非常常见的问题。
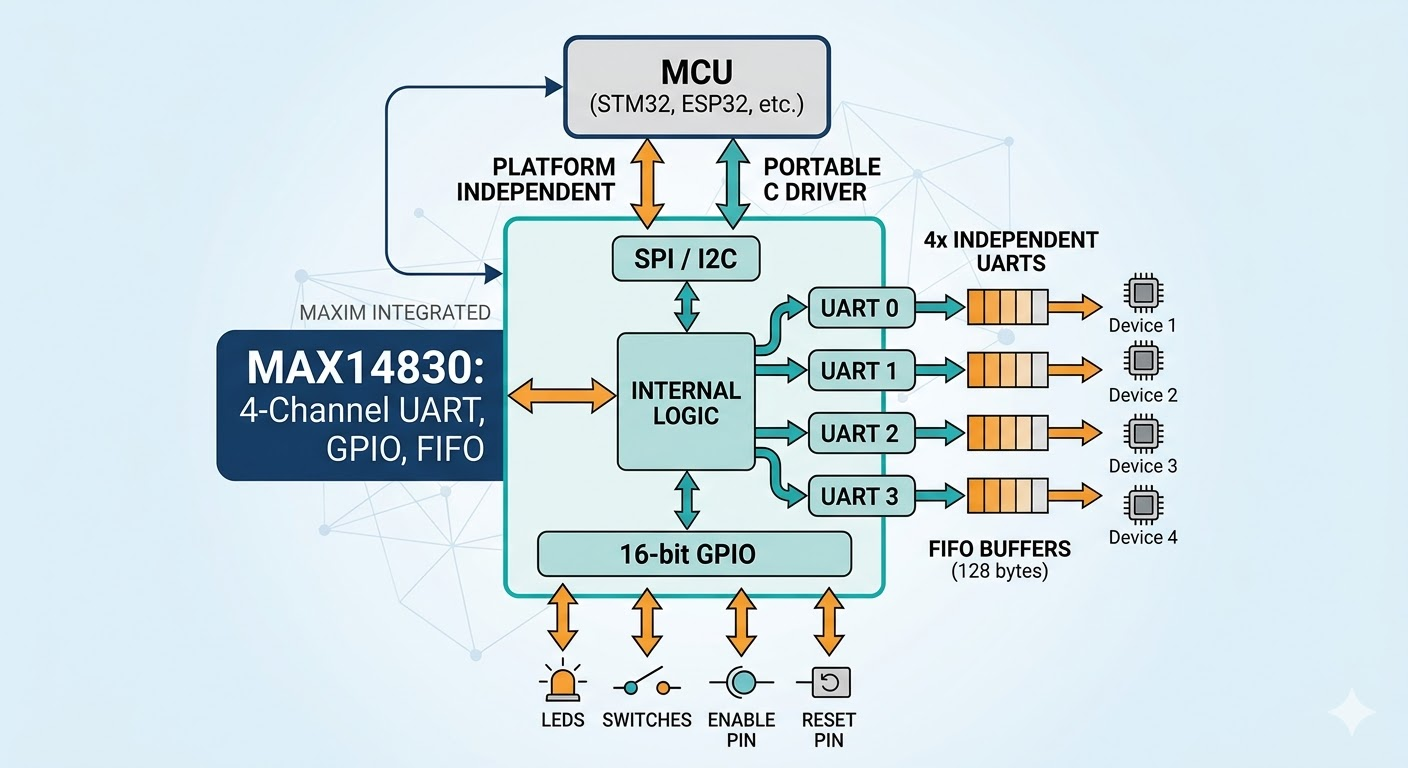
当主控需要同时连接调试接口、通信模组、下位机设备或多路传感器时,片上 UART 数量往往很快成为限制条件。此类场景下,外扩串口芯片通常是更现实的方案,而 MAX14830 就是其中较典型的一种:通过 SPI 或 I2C 总线,可以扩展出 4 路独立 UART,同时提供 FIFO 和 GPIO 能力,适合承担多串口桥接角色。
GitHub 上的 wdfk-prog/max14830,就是一个面向这颗芯片的开源 C 驱动实现。这个项目的重点不在“做了多少高级功能”,而在于它明确采用了 可移植、平台无关、基于 HAL 抽象 的实现思路。对于正在做 MAX14830 接入、板级驱动开发,或者准备搭建多串口扩展方案的人来说,这类代码通常比单平台 Demo 更有参考价值。
项目定位很明确:不是平台示例,而是通用驱动骨架
从仓库主页给出的描述来看,这个项目将自己定义为:
一个面向 Maxim Integrated MAX14830 的、可移植的平台无关 C 驱动,通过 HAL 方式集成到不同微控制器项目中。
这一定义本身就说明了它的设计重点:
驱动逻辑与平台实现解耦。
在嵌入式开发里,驱动是否真正可复用,关键不在于 API 数量,而在于是否把“芯片功能逻辑”和“底层硬件访问”切分清楚。这个仓库采用的方式是,把 SPI 初始化、SPI 收发、RESET 控制、延时等平台相关能力抽象成函数指针,由使用者在自己的工程里实现;而 MAX14830 的寄存器访问、串口配置和 GPIO 控制逻辑,则保留在驱动层内部。
这种写法的好处很直接:
- 不依赖某一家的 HAL 库
- 不绑定特定 RTOS
- 更容易迁移到 STM32、ESP32、Arduino 等不同平台
- 后续做二次封装时,边界比较清晰
对于一个底层驱动项目来说,这种结构通常比“只在某个开发板上能跑”的代码更有长期价值。
当前功能覆盖已经足够支撑基础落地
从 README 提供的信息来看,这个驱动当前已经覆盖了 MAX14830 的两类主要能力:UART 和 GPIO。
UART 部分
项目已经实现了四路 UART 的基础能力,包括:
- 初始化全部四个 UART 通道
- 配置波特率
- 配置数据位、奇偶校验位、停止位
- 基于 FIFO 的读写操作
这意味着它已经具备“把芯片跑起来并完成基础通信”的核心条件。
对于很多项目来说,驱动的第一阶段目标并不是功能做满,而是先把外设接通、把数据链路跑通。就这一点而言,这个项目的覆盖面已经比较实用。
GPIO 部分
除了 UART,仓库也实现了若干 GPIO 相关接口,包括:
- 配置 16 路 GPIO 中任意引脚为输出
- 设置输出高低电平
- 支持推挽与开漏输出模式
这部分能力虽然未必是所有人最先使用的功能,但对于板级联调来说很有意义。
如果系统中存在模块使能、复位控制、方向控制等辅助信号需求,那么 MAX14830 自带 GPIO 的可用性会提升整颗芯片的工程价值。
项目的边界写得比较清楚,这一点反而很重要
这个仓库有一个比较好的地方,就是没有刻意把自己描述成“已经完成的全功能方案”。README 里明确说明:
- 当前仅支持 SPI 模式
- 数据传输使用 轮询方式
- 中断处理 尚未实现
- I2C 模式 尚未实现
这几句话看起来简单,但工程意义很强,因为它直接定义了使用边界。
如果系统当前就是 SPI 接入、业务负载不高、先以功能验证和快速集成为目标,那么这份驱动已经具备较高的可用性。
但如果项目后续要追求更低 CPU 占用、更高通信效率,或者准备把 MAX14830 做成完整的异步串口扩展层,那么中断支持和更完整的运行机制迟早要补上。
换句话说,这个仓库更像是一个基础版驱动实现,而不是已经走到产品化阶段的完整方案。
但对于底层驱动来说,“基础版且边界清楚”,很多时候比“功能写得很多但不清楚是否可靠”更有价值。
接入方式相对直接,适合 MCU 工程实际使用
从 README 给出的使用方式看,这个项目没有引入复杂的构建依赖,整体接入路径非常传统,也比较符合 MCU 工程的实际习惯。
1. 直接纳入源文件
只需要将 max14830.c 和 max14830.h 拷贝到工程中,并包含头文件即可。
这种组织方式对裸机项目、RTOS 项目、传统 IDE 工程都比较友好。
2. 实现平台 HAL 接口
使用者需要提供几个最基本的平台函数,例如:
- SPI 初始化
- SPI 事务传输
- RESET 引脚控制
- 毫秒延时
这意味着驱动作者没有替使用者“封装掉平台差异”,而是明确把差异控制在最小边界内。这种做法在嵌入式场景里通常更合理,因为不同平台的 SPI 框架、GPIO 控制方式和时序实现差异很大,强行统一反而容易引入额外复杂度。
3. 创建句柄并完成初始化
README 里给出的初始化方式也比较标准:
实例化 struct max14830,绑定上述 HAL 函数,再调用 max14830_init() 完成芯片初始化。
这种设计风格偏底层、偏 C 语言原生习惯,没有额外对象模型,也没有隐藏状态机,比较适合作为驱动层长期维护。
一个容易被忽略、但必须重视的配置项:晶振频率
项目文档中特别强调了这样一个宏:
1 |
并明确指出,这个值必须与 MAX14830 芯片外部连接的晶振频率严格一致。
这是一个很典型的底层驱动细节。
如果这个配置错了,问题通常不会表现为“编译失败”或“初始化报错”,而是更隐蔽的现象,例如:
- 实际串口波特率偏差
- 通信异常
- 数据帧不稳定
- 与外部设备无法可靠对接
从工程角度看,这种信息能够在 README 中被明确标注出来,是加分项。因为它把硬件前提条件提前暴露出来了,减少了后续联调中的隐性排查成本。
这类实现更适合什么场景
结合 MAX14830 本身的定位,以及该仓库当前状态,可以把它的适用场景大致归纳为三类。
多串口资源扩展
这是最直接的用途。
当 MCU 原生 UART 不够,而系统中又确实存在多路串口设备接入需求时,这类芯片方案本身就成立,而仓库提供的驱动实现可以作为较低成本的起点。
硬件 bring-up 与方案验证
如果当前项目正处于板级联调阶段,重点是确认 SPI 链路、串口通道、GPIO 控制、波特率配置是否都按预期工作,那么这种实现简洁、依赖少、接入直观的驱动通常非常适合。
内部驱动封装的底层基础
对于有一定工程体系的团队来说,外部开源驱动往往不会直接暴露到业务层,而是先被包装成统一接口。
在这种情况下,这个仓库的意义不只是“能不能直接拿来用”,更在于它提供了一个结构清晰、边界明确的底层实现起点。
从成熟度看,它更像一个“可用驱动”
在嵌入式领域,很多真正有价值的驱动代码,本来就不是靠 star 数体现价值,而是靠以下几点:
- 是否聚焦于一个具体问题
- 是否把抽象层次处理清楚
- 是否具备可以继续扩展的结构
- 是否能降低第一次接入成本
从这些角度看,这个仓库作为 MAX14830 的基础驱动版本,已经具备一定参考意义。
总结
wdfk-prog/max14830 不是那种靠“功能繁多”取胜的项目。
它更像一个围绕 MAX14830 做出来的、偏工程落地导向的基础驱动实现:目标明确,结构直接,HAL 边界清晰,适合用来做多串口扩展方案的接入起点。
它当前的价值主要体现在几个方面:
- 采用平台无关的 C 语言驱动结构,便于迁移
- 已覆盖四路 UART 的基础配置与 FIFO 收发
- 提供了 GPIO 输出控制能力
- 文档中明确说明了 SPI / polling 的当前实现边界
- 接入方式简单,适合 MCU 工程直接纳入
同时,它也有需要谨慎处理的地方:
- 尚未实现中断与 I2C 模式
- 仓库成熟度仍偏基础版本
 微信
微信- 支付寶









