从 Node-ID 到线长:读懂 CAN/CANopen 网络拓扑限制
@[toc]
结论先行
“CANopen 逻辑上限制到 128,物理上一段常见只能挂 64 个节点;1 Mbit/s 可到 25 m,50 kbit/s 可到 1000 m”这段话把两类约束放在了一起:一类是 CANopen 协议层的地址空间,另一类是 CAN 物理层的线缆、终端、收发器负载和传播延迟。两者都影响网络规模,但判断方式完全不同。
- CANopen 的 Node-ID 是逻辑地址问题,7 bit 编码提供 0
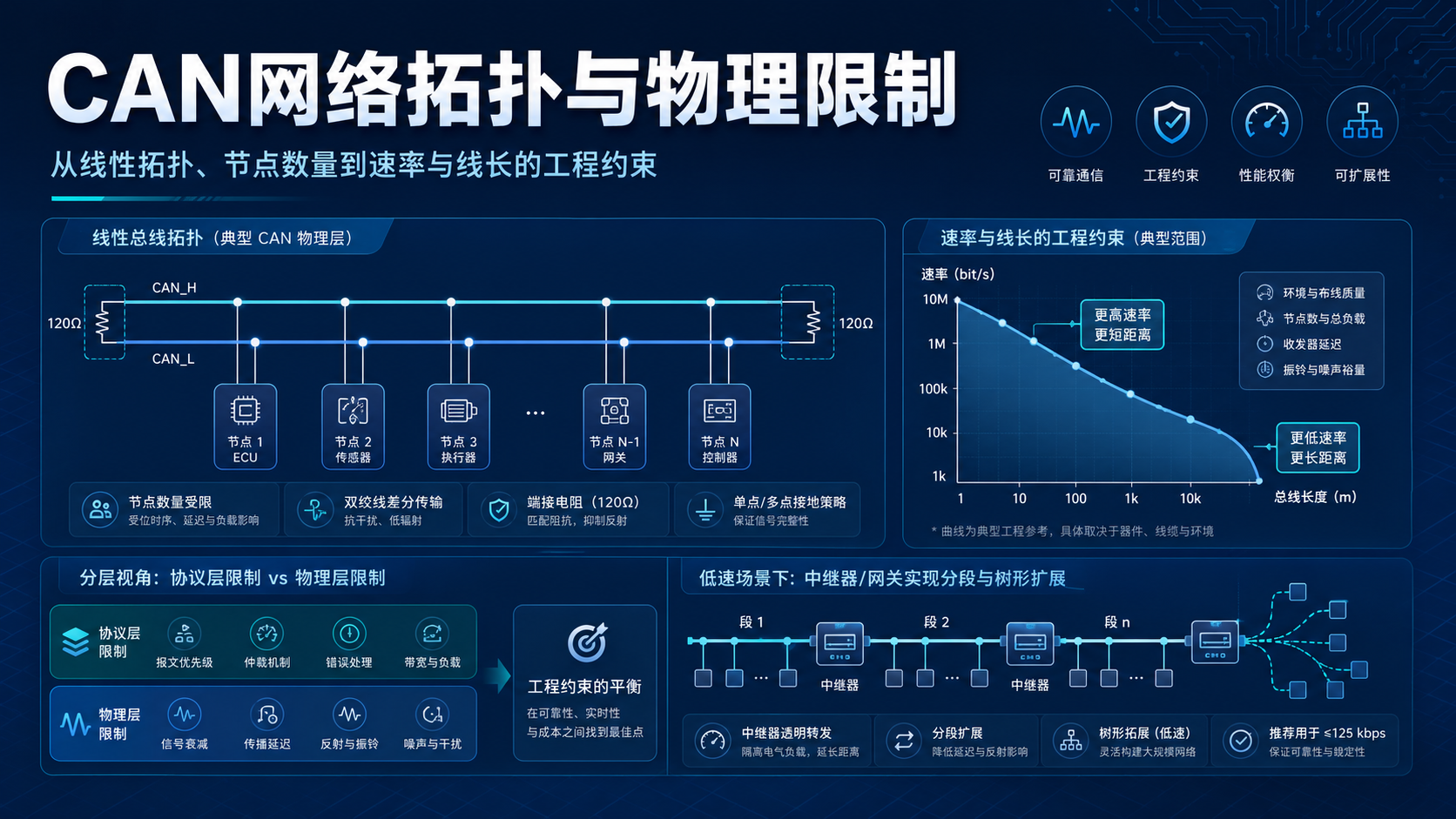
127 的编号空间;普通节点通常使用 1127,0 用于广播或特殊用途。 - CAN 的线性拓扑是物理层问题。一个 CAN 总线段应尽量保持主干线连续,两端各 120 Ω 终端,节点通过短支线接入。
- 线长受位速率限制。速率越高,单个 bit 的时间越短,信号传播、收发器延迟和采样裕量越紧张,所以允许总线越短。
- 节点数量受收发器和线缆负载限制。协议允许的地址数量不等于一段总线的可靠驱动能力。
- 中继器可以在低速下扩展网络规模和构造分段/树形结构,但中继器本身也会引入传播延迟。
一、先把“逻辑网络”和“物理总线”分开
CANopen 是建立在 CAN 之上的高层通信体系,主要规定通信对象、网络管理、设备对象字典和应用/设备配置方式;底层数据链路和物理传输仍然依赖 CAN 及其物理层实现。工程上讨论“最多多少节点”时,必须先说明是在讲协议地址空间,还是在讲单段总线的电气承载能力。
协议地址空间回答的是“这些设备能否被区分”;物理总线能力回答的是“这些设备挂上去以后,波形、仲裁和采样是否仍可靠”。前者由协议字段决定,后者由收发器、线缆、终端、支线、隔离器件、速率和 EMC 环境共同决定。
二、为什么 CANopen 会出现 128、127 和 0
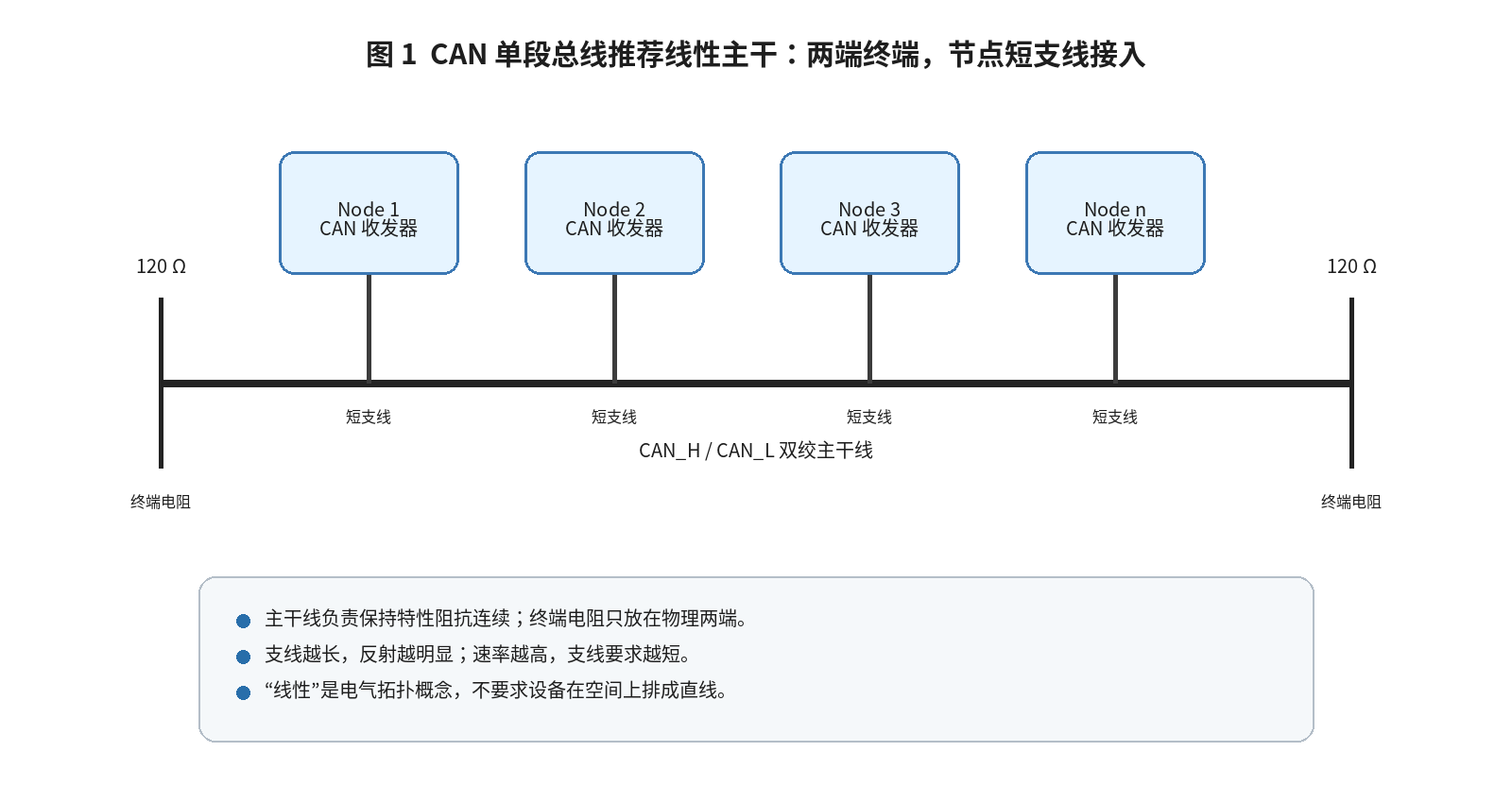
CANopen 的预定义连接集通常把 11 bit CAN 标识符拆成两部分:功能码和 Node-ID。Node-ID 占 7 bit,因此编码空间共有 128 种,也就是 0~127。
但普通设备节点通常不是 0127 共 128 个,而是 1127 共 127 个。Node-ID 0 通常用于广播或特殊用途,例如网络管理命令可以面向所有节点。因此原文中的“logically limited by CANopen to 128”更准确地说是:Node-ID 字段宽度提供 128 种编码,但普通可配置节点通常为 127 个。
| 说法 | 含义 | 工程解释 |
|---|---|---|
| 7 bit Node-ID | 2^7 = 128 种编码 | 这是字段宽度,不是普通设备数量 |
| Node-ID 1~127 | 普通设备节点编号 | 每个节点应唯一 |
| Node-ID 0 | 广播或特殊用途 | 不作为普通设备地址使用 |
| “最多 128” | 常见的简化表达 | 容易把编码空间和普通节点数混在一起 |
三、为什么 CAN 物理拓扑强调“线性”
CAN 使用差分总线传输。为了让总线阻抗连续并减少反射,一个 CAN 物理段通常按主干线布线,两端各放一个 120 Ω 终端电阻,节点用短支线接入。这里的“线性”不是指设备必须在空间里排成一条直线,而是指电气拓扑尽量接近一条连续传输线。
星形、长分支和随意树形的问题在于:每个分叉点都会改变阻抗,长支线会在信号边沿产生反射。反射叠加到有效信号上,可能导致接收器在采样点附近误判 dominant/recessive 状态。速率越高,位时间越短,反射留给系统恢复的时间越少,所以高速网络对支线和拓扑更敏感。
因此,单段 CAN 设计的基本原则是:主干尽量连续,终端只在物理两端,支线尽量短,不把多个长分支直接并在一个中心点上。
四、为什么一段总线常见只能挂有限节点
CANopen 的 Node-ID 空间允许 127 个普通节点,但这并不意味着一个物理段就能可靠挂满 127 个收发器。每个节点都通过 CAN 收发器连接 CAN_H/CAN_L,会给总线带来输入电阻、输入电容、ESD/保护器件寄生参数和支线长度。节点越多,总线负载越重,边沿越慢,抗干扰裕量越小。
不同资料和收发器会给出不同节点数量。例如,高速 CAN 标准相关资料常以 1 Mbit/s、40 m、30 个节点作为基准示例;现代低负载收发器可能支持更多节点。原文中的“64 nodes in one network segment”应理解为某类驱动器/收发器条件下的工程能力,而不是 CANopen 协议本身的硬限制。
工程判断应以目标收发器 datasheet 为准,同时核算:
- 总线两端终端是否正确;
- 全部节点的等效输入负载是否在收发器驱动能力内;
- 线缆阻抗、衰减和传播延迟是否满足速率要求;
- 支线长度和累计支线长度是否符合设计表;
- 是否存在隔离器、共模电感、防护器件带来的额外延迟和寄生参数。
五、为什么 1 Mbit/s 只能约 25 m,而 50 kbit/s 可以约 1000 m
CAN 的仲裁和 ACK 机制要求节点在发送时也能读回总线状态。两个最远节点之间的信号传播,以及收发器、隔离器、控制器和采样点配置的延迟,都必须落在一个 bit 的时序预算内。
位速率越高,单 bit 时间越短:
| 位速率 | 单 bit 时间 |
|---|---|
| 1 Mbit/s | 1 µs |
| 500 kbit/s | 2 µs |
| 250 kbit/s | 4 µs |
| 125 kbit/s | 8 µs |
| 50 kbit/s | 20 µs |
当速率从 50 kbit/s 提高到 1 Mbit/s,单 bit 时间从 20 µs 缩短到 1 µs,时序预算压缩为原来的 1/20。此时同样的线缆传播延迟、收发器延迟和反射恢复时间会占据更大比例,所以必须缩短总线。
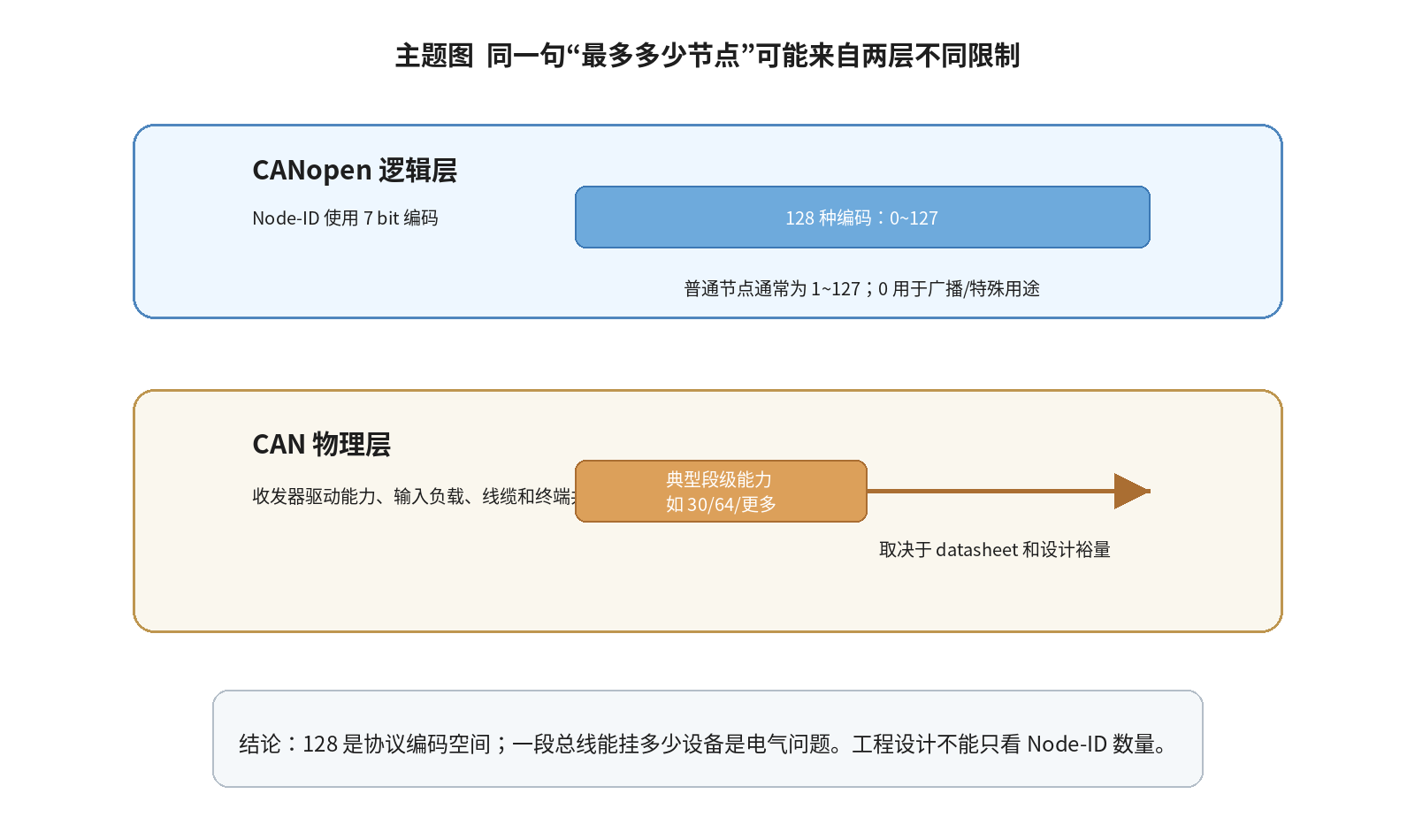
CAN in Automation 给出的 CANopen CC 典型位时序表可以直接体现这种关系:
| 位速率 | 最大总线长度 | 最大未终端支线长度 | 累计支线长度 |
|---|---|---|---|
| 1 Mbit/s | 25 m | 1.5 m | 7.5 m |
| 800 kbit/s | 50 m | 2.5 m | 12.5 m |
| 500 kbit/s | 100 m | 5.5 m | 27.5 m |
| 250 kbit/s | 250 m | 11 m | 55 m |
| 125 kbit/s | 500 m | 22 m | 110 m |
| 50 kbit/s | 1000 m | 55 m | 275 m |
| 20 kbit/s | 2500 m | 137.5 m | 687.5 m |
| 10 kbit/s | 5000 m | 275 m | 1375 m |
这些值不是任意规定,而是把传播延迟、采样点、线缆参数和支线反射折中后的工程表。实际项目还要考虑线缆质量、隔离器延迟、收发器型号、供电容差和环境噪声。
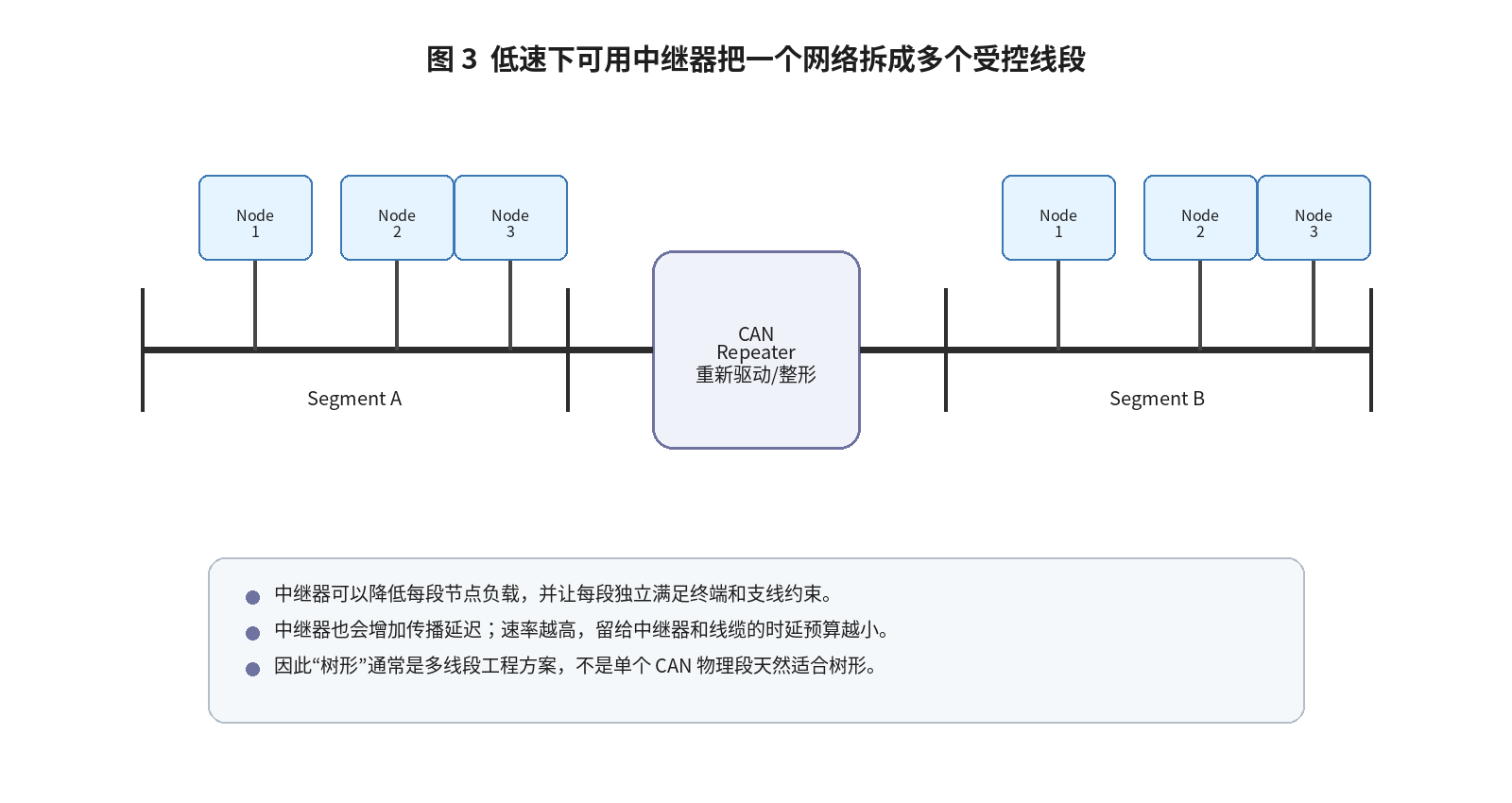
六、为什么低速下可以用 repeater 扩展网络
中继器可以把一个 CAN 网络拆成多个物理段。每一段重新驱动信号、重新满足终端和支线约束,并降低单段节点负载。因此在低速场景下,可以通过中继器扩展总线长度,或者构造分段式、近似树形的网络。
但中继器不是“免费”的。它会增加传播延迟,而 CAN 仲裁、ACK 和采样都要消耗同一份 bit 时间预算。速率越高,时序预算越紧,留给中继器和长线缆的空间越小。因此“低速下可以通过 repeater 做树形”并不意味着 CAN 单段天然支持任意树形,也不意味着可以无限级联中继器。
七、工程落地时应怎样取值
如果只是短线调试,两块板或一块板加 USB-CAN 适配器,通常更关注终端电阻、波特率一致和接线正确。若进入设备网络设计,应保守处理线长、节点数和支线:
| 设计项 | 建议做法 | 原因 |
|---|---|---|
| 拓扑 | 主干线 + 短支线 | 降低阻抗突变和反射 |
| 终端 | 只在物理两端各 120 Ω | 匹配线缆特性阻抗 |
| 位速率 | 按线长反推,不盲目取最高速 | 高速会压缩传播延迟预算 |
| 节点数 | 按收发器 datasheet 和总负载核算 | 协议地址数量不等于驱动能力 |
| 支线 | 高速时尽量短 | 长支线会产生反射 |
| 中继器 | 低速、长距离或大节点数时再考虑 | 中继器降低负载,但增加延迟 |
| EMC | 评估屏蔽、共模电感、隔离和保护器件 | 可靠性通常受系统级细节影响 |
总结
这段拓扑说明真正想表达的是:CANopen 给了设备一个逻辑地址体系,但 CAN 网络能跑多远、能挂多少节点,主要由物理层决定。Node-ID 的 7 bit 编码解释了 128/127 的来源;线性主干、两端终端和短支线解释了为什么 CAN 不适合任意星形;位时间和传播延迟解释了为什么 1 Mbit/s 只能短距离,而 50 kbit/s 可以做到千米级;中继器则是在低速和分段设计下扩展网络的工程手段。
因此,正确的设计顺序不是先问“CANopen 最多多少节点”,而是先确定距离、速率、节点数、收发器和布线方式,再检查这些条件是否同时满足 CAN 物理层和 CANopen 地址层的约束。
参考资料
- CAN in Automation, “CANopen lower layers,” CANopen CC bit timing table, bus length, stub length, and physical layer notes.
- CAN in Automation, “CANopen CC – The standardized embedded network,” CANopen as a CAN-based communication system and lower-layer overview.
- Open Vehicles Documentation, “CANopen Basics,” node IDs 1–127 and node address 0 for broadcasts.
- Texas Instruments, “Controller Area Network Physical Layer Requirements,” SLLA270, physical topology, 120 Ω termination, suggested cable length vs. signaling rate, and delay-budget discussion.
- Microchip Support, “MCP2561/MCP25625 — What is the maximum number of nodes on the CAN bus?”, node count as a transceiver-drive/load question.
 微信
微信- 支付寶








